当前,以室外自动驾驶和室内机器人为代表的AI技术在面对现实世界的复杂性和多样性时,其泛化能力和反应速度明显不足。地平线机器人在2022年基于旭日X3芯片推出了机器人开发平台,该平台软硬结合、高效易用,包括芯片+OS+ROS中间件+AI算法+应用案例等全套开发套件。室外场景复杂目标检测和室内场景深度估计是目前平台在不断优化和深度打磨的算法模型。为了增强学术界和产业界在机器视觉领域更好的协作,吸引学术界更多的关注复杂场景下的视觉感知问题,我们将组织“复杂场景机器视觉挑战赛”,目标是思考如何在终端实现高效的视觉感知算法,挖掘在精度和速度上都表现优异的室外场景复杂目标检测和室内场景深度估计模型。
组织者:李乔哲、高吟佳、赵腾飞、白岩、张嘉慧
组织单位:中国科学院自动化研究所
联系电话:010-82544720
邮件地址:yan.bai@ia.ac.cn
联系地址:北京市海淀区中关村东路95号
按自愿报名的原则,参赛团队和成员的组成可以为:
1.各培养单位正式注册教师、在读研究生以及博士生。
2.国内各研究团体、企事业单位。
以个人或团队方式均可通过邮件方式报名参赛,每个参赛队伍人员不超过5人,每名参赛选手只能参加1个参赛队。每个参赛队伍在竞赛截止时间之前最多可更新2次结果,截止时间之后不能再更新结果。参赛队发送报名信息至liqiaozhe2015@ia.ac.cn。
邮件标题格式“复杂场景机器视觉挑战赛2022_(参赛队名称)”。
邮件内容应包括个人或团队基本信息、负责人基本信息、参赛人数、联系方式(手机,邮箱),所有表格中对应成员的信息均为必填项,填写后保存为excel的格式,文件命名为“复杂场景机器视觉挑战赛2022_(参赛队名称).xlsx”。
组织方收到邮件并与报名者确认后,报名成功。
报名截止日期为:2022年7月31日。
| 参赛队名 | ||||||
|---|---|---|---|---|---|---|
| 赛道选取 | ||||||
| 序号 | 角色 | 姓名 | 单位 | 文化程度 | 手机号 | 邮箱 |
| 1 | 队长 | |||||
| 2 | 队员 | |||||
| 3 | 队员 | |||||
| 4 | 队员 | |||||
| 5 | 队员 | |||||
拟采用的组织方式为组织方为参赛选手提供完整的技术支持,协助开发者跑通流程,提交算法模型后,组织方会在硬件测试环境和测试样本数据上进行测试,通过验证运行可执行程序的输出结果,综合评价模型在多平台上的性能、速度指标,评出名次。本次竞赛设置室外场景复杂目标检测、室内场景深度估计两个赛道,参赛选手可以根据自己情况自由进行赛道选取。
赛程如下:
| 时间 | 具体安排 |
|---|---|
| 6月21日 | 组委会在网站公布比赛任务、参赛办法和评比方式。 |
| 6月22日-7月31日 | 参赛队伍报名及邮件资格确认。 |
| 7月21日-8月31日 | 比赛开始,组委会发布比赛数据集。各参赛队在规定时间内完成比赛任务,将结果按照规定的格式上传至指定位置。每个参赛队只能提交一次结果参与评测(如果需要修改,请在规定时间内联系组委会进行修改)。 |
| 9月1日-9月30日 | 评委按照规定的评测方法,验证各队程序执行结果,对结果进行评测,评比各队名次。 |
| 10月14日- 10月17日 | 在第五届中国模式识别与计算机视觉大会PRCV2022竞赛单元介绍获奖单位比赛方法,为获奖团队颁奖。 |
本次比赛的数据来源于组织方发布的数据集,数据集具有如下特点:
1、室外场景复杂目标检测数据集
图像大小:图像分辨率为2048*1024
测试集:2000张测试图片,里面包含异形车目标
训练集:不限(组织方会提供一定量的异形车标注数据),参赛队伍可使用任何数据集训练模型。
2、室内场景深度估计数据集
图像大小:RGB图像分辨率约为1920*1080,depth图像分辨率约为224*108,且RGB与depth图像已配准
测试集:1000组RGB-D图像,数据采集来自机器人装载的RGB-D传感器模组(彩色相机-ToF相机)
验证集:200组RGB-D图像,数据采集来自机器人装载的RGB-D传感器模组(彩色相机-ToF相机)
训练集:不限,参赛队伍可使用任何数据集训练模型。
赛道一:室外场景复杂目标检测
本赛道提供小批量复杂目标—异形车训练集,如图所示。参赛选手在不限制训练样本的条件下对异形车检测任务进行建模,最终各参赛者需提供对输入图像进行目标检测的模型,模型输出为目标框。我们会在地平线旭日X3派平台下评估提交的模型在测试样本下的性能和速度。

异形车数据示意图
赛道二:室内场景深度估计
深度估计是计算机视觉中的一个基本问题,在机器人环境感知中具有重要作用。该任务能够恢复出场景的完整深度信息,可以为机器人三维场景理解,目标形状估计,决策规划控制提供参考。本赛道的深度估计任务如图所示,输入图像为(a)高分辨率彩色图像,(b)低分辨率稀疏深度图像,输出为(c)高分辨率稠密深度估计图像,其中(b)可用于辅助深度估计。最终参赛者须提供对输入图像进行深度估计的模型。我们将在地平线旭日X3派中评估模型的精度与速度。

(a) 输入图像-RGB
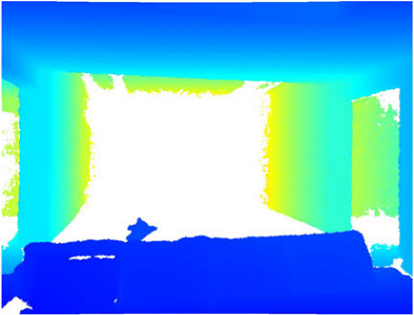
(b) 输入图像-稀疏depth
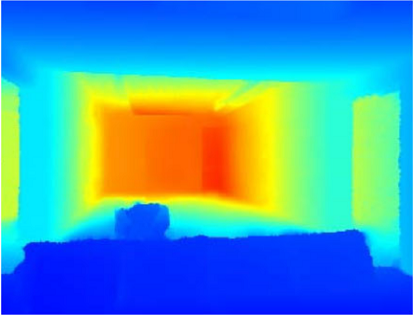
(c) 输出图像-稠密depth
附:关于比赛平台--地平线旭日X3派的相关信息:
产品介绍:https://developer.horizon.ai/sunrise
用户手册:https://developer.horizon.ai/api/v1/fileData/documents_pi/index.html
工具链手册:https://developer.horizon.ai/resource
购买链接:https://detail.tmall.com/item.htm?id=675925264685
更多信息,请访问地平线开发者社区官网进行查阅;如需技术支持,可在社区论坛进行发帖提问。
赛道一:室外场景复杂目标检测
针对比赛任务中视觉理解的目标检测要求,在给定的2000张测试图像进行复杂目标的检测
1、性能评价
• IOU (Intersection of Union):框与真实标注框的交并比
• Average Precision:PR曲线与坐标轴形成的区域面积
• Recall @ Precison 0.9/0.95:precision分别为0.9和0.95时对应的recall值
2、速度评价
速度指标采用每秒帧率(FPS,Frames Per Second)作为评价指标
3、最终评价指标
在本次竞赛中,最终的评价指标要考虑模型在X3派平台上的性能和速度指标。
赛道二:室内场景深度估计
针对比赛任务中深度估计的要求,对给定的测试图像进行稠密深度估计,以png文件输出每张测试图像的深度估计结果。性能评价时将生成的深度估计图像与gound truth深度图进行比较。
1、精度评价
a. RMSE (Root Mean Squared Error)
b. REL (Mean Absolute Relative Error)
2、速度评价
算法在地平线X3派平台上的FPS。
3、最终评价指标
在本次竞赛中,最终的评价指标将综合考虑模型的精度,速度指标。参赛队伍的最终排名为精度排名、速度排名的平均值。
为了方便团队内部和大会组委会测试算法模型,各竞赛团队需提供的模型要求如下:
1、需提供可用、真实的算法模型和相关测试代码,并提供对应的使用说明文档,说明文档内容包括测试方法用例介绍;
2、提交的模型可在地平线提供的环境下测试;
本次竞赛每个赛道各设一等奖1名(奖金4万元人民币),二等奖1名(奖金2万元人民币),三等奖2名(奖金各0.5万元人民币)。
本次比赛奖金由北京地平线机器人技术研发有限公司赞助。
各参赛队伍根据比赛成绩均可获得由计算机视觉专委会、中国科学院自动化研究所智能系统与工程研究中心共同颁发的获奖证书和奖金。
组委会将举办挑战赛技术论坛,邀请每项任务获得一、二等奖的参赛队伍参加作特邀技术报告。
1. 各参赛队在赛前需签订数据使用协议,承诺本竞赛提供的测试数据集仅能用于本竞赛,不用于除本竞赛外的任何其他用途,并承诺数据用后即刻删除,不可扩散,组织方保留追究法律责任的权利。
2. 各参赛队需要承诺本队提交的结果可重复,参赛队所有的方案、算法以及相关的知识产权均属于参赛队伍所有,组织方承诺履行保密义务,并不用于除本比赛外的任何其他用途。
3. 参赛队伍应保证所提供的方案、算法属于自有知识产权。组织方对参赛队伍因使用本队提供/完成的算法和结果而产生的任何实际侵权或者被任何第三方指控侵权概不负责。一旦上述情况和事件发生参赛队伍必须承担一切相关法律责任和经济赔偿责任并保护组织方免于承担该等责任。
4.该项竞赛为公益性赛事,全程不收取参赛队伍任何费用。
5.竞赛期间,组委会坚持公开、公平、公正的原则。参赛结果评比由专业评审队完成,如参赛队伍对公布结果有异议,可申请成绩复核,申请通过后到组委会指定地点进行现场复核。